'VAZI' :
la carte Surface 
 Téléchargement
schéma / typon / logiciel
Téléchargement
schéma / typon / logiciel
Description
des fonctions de la carte :
 La carte est prévue pour
s'alimenter à partir de 12 ou de 24V ( selon version )
La carte est prévue pour
s'alimenter à partir de 12 ou de 24V ( selon version )
Dialogue sur le bus ( voir architecture
générale ) avec les cartes du ROV
Acquisition des valeurs de positions du joystick
et des poussoirs de commande
Affichage des différents paramètres
de l'engin sur LCD
Gestion des alarmes voie d'eau et niveau batterie
( LED défaut et Buzzer )
Mise en forme de la vidéo ( entrée
différentielle bus , sortie 75 Ohms vidéo composite )
Vue
de la carte prototype
Nota : l'affichage correspond seulement au
programme de test
Caractéristiques
:
Dimensions : 80 x 118 mm
4 trous de fixation diam 3,2mm , entraxe 72 x 112 mm
Consommation : 90 mA environ
Description
du fonctionnement :
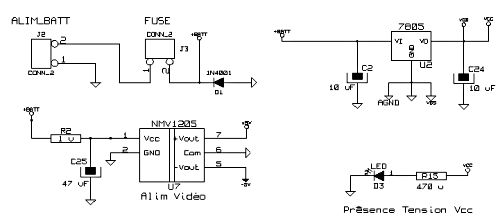
 Alimentation :
Alimentation :
|
|
Il fournit du 5V régulé au microcontroleur et
aux
différents circuits logiques de la carte.
Un fusible externe
peut être utilisé en le connectant sur J3. D1 permet la
protection contre les inversions de polarité.
Une LED ( D3 ) permet la visualisation de la présence 5V
Le convertisseur NVM1205 ( ou NMV2405 selon la tension d'alimentation )
permet d'alimenter l'interface vidéo.
 Microcontrolleur et Entrées/Sorties :
Microcontrolleur et Entrées/Sorties :
Le microcontroleur utilisé est un PIC 16F628 de
microchip , un modèle assez répandu aujourd'hui et peu
coûteux.
Le PIC utilise un quartz afin d'avoir une fréquence
d'horloge précise , nécessaire pour les fonctions de
dialogue sur le bus et de génération des signaux PWM.
L'ensemble des E/S est dirigé vers les différents
sous-ensembles que nous allons détailler.
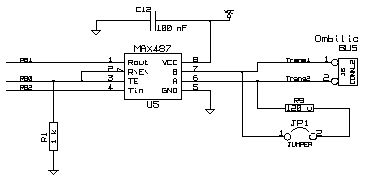
 Interface bus :
Interface bus :
|
|
U5 est simplement un interface entre les niveaux logiques
utilisés par le PIC et le bus RS485 ( différentiel
). Il fonctionne alternativement en
émission et en réception. Pour envoyer une commande , le
PIC le fait passer en émission ( sortie RB0 )
puis il repasse en réception afin de pouvoir recevoir la
réponse de la carte interrogée .
Le cavalier JP1 permet de mettre en service une résistance
de terminaison de bus.
Coté surface ce cavalier doit toujours
être mis en place afin de terminer correctement la liaison.
Affichage et
buzzer
Pour l'afficheur :
P2 permet le réglage du contraste du LCD et R6 fixe
l'intensité du rétro éclairage du LCD.
Coté interface , le LCD est géré en 4 bits en
écriture seulement ( pas de gestion de l'état du LCD )
Pour le buzzer :
pas de commentaires ! , ça fait du bruit et ça s'allume ,
c'est tout !
Converstion
analogique numérique ( lecture du joystick ) + lecture poussoir
du joystick
Le coeur de ce sous-ensemble est un convertisseur 8 voies 8 bits
ADC0838 (
datasheet
) , chaque entrée est filtrée par un condensateur (
C3 - C10 )
La tension de référence du convertisseur est de 5V.
Une des entrée est dédiée à la mesure de la
tension de la batterie de surface ( canal 7 ).
U1 est un multiplexeur analogique qui permet ici de selectionner un
poussoir parmi les quatre possibles et lire son état sur RA5.
( ces poussoirs servent à diverses fonction comme l'allumage des
phares ou le choix des différents mode de pilotage )
Petite remarque concernant le 'Chip select' des deux circuits ( ADC et
4052 ) : la ligne RB6 est utilisée pour le controle des deux
circuits , T2 permet l'inversion du signal pour que le PIC adresse l'un
ou l'autre des circuits. ( quant RB6 est à 0 , c'est le
convertisseur A/N qui est sélectionné , dans le cas
contraire c'est le multiplexeur )
 Conversion Vidéo
Conversion Vidéo
le rôle principal est assuré par U4
il s'agit de notre montage favori de gestion du bus
vidéo ( pour plus de détails : voir
description
)
Mise
à jour de cette page : 30 Avril 2006





