La fonction
essentielle d'un ROV d'exploration est de faire ...
... des images !
Il est donc important de pouvoir véhiculer les informations
vidéo sur une distance relativement importante sans les
dégrader afin d'obtenir une image de qualité. Pour
atteindre cet objectif l'information doit être transmise en mode
différentiel afin d'être la moins sensible possible aux
perturbations exterieures .
Cela est d'autant plus necessaire que dans
le même câble circule les données
échangées entre la console de pilotage et le ROV et
eventuellement l'alimentation electrique de l'engin !

Pour mémoire : le câble utilisé comme support de
transmission est
un câble type réseau d'impédance 100/120 Ohms. Il
comporte en général 4 paires ; sur DIXI une paire est
réservée à la vidéo , une autre à la
liaison RS485 et les deux dernières sont utilisées pour
transmettre l'alimentation ( 220V / 50Hz )
Le circuit se décompose en deux
partie :
 L'émetteur
: L'émetteur
:
en liaison avec la caméra , il converti le signal vidéo
75
Ohms asymétrique en signal différentiel apte à
voyager (confortablement !) sur notre câble. |
Le
récepteur :
Il recoit le signal différentiel et le
converti en signal vidéo 75
Ohms asymétrique à destination d'un moniteur ( ou TV ,
magnétoscope , carte d'acquisition , ... ). |
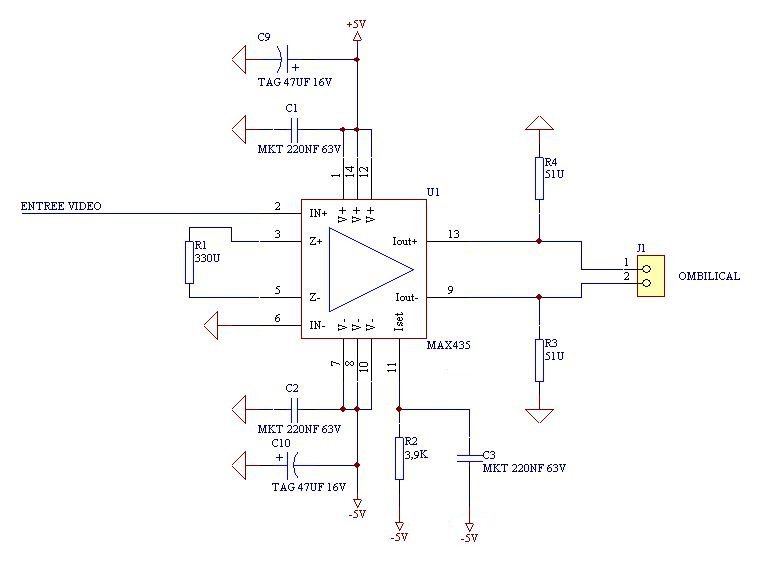
Chacun de ces deux ensembles est construit autour d'un amplificateur
opérationnel large bande à transimpédance . Il
s'agit du MAX435 ( sortie différentielles ) pour l'emetteur et
du MAX436 pour le recepteur. Ces deux circuits sont fabriqués
par MAXIM (pas le restaurant !).
Voir la
documentation technique
Ce circuit est décrit en détail dans le datasheet du
circuit , je vous engage donc à vous y plonger !
Modifications par
rapport à la note d'application de Maxim :
La première modification
significative consiste à la
"division" de la résistance de terminaison de 100
Ohms en deux résistances de 51 Ohms reliées à la
masse. Cette modification , en apparence anodine , permet en fait de
fixer le potentiel de la paire utilisée afin de limiter la
tension de mode commun sur les entrées du MAX436 ( surtout si
comme sur DIXI on véhicule du 220 V sur les autres paires du
câbles ! ).
Pour l'emetteur nous avons ensuite modifié
les valeurs de R1 ( passage a 330 Ohms ) et de R2 ( passage de 4,7K
à 3,9K ); pourquoi ?
Tout d'abord, il faut savoir ( cf datasheet ) que R2 règle le
courant de polarisation de l'ampli et R1 son gain. Avec les valeurs
conseillées on s'apercoit que si le signal vidéo devient
supérieur à 0,9V , l'ampli commence à saturer. On
s'en aperçoit surtout avec des images trés lumineuses ou
avec des sources vidéo qui ne respecte pas bien les valeurs de
tension de la norme ( TV , magnétoscope , ... c'est
dailleurs comme ça que nous nous en sommes aperçus ! ).
Nous avons donc choisit d'augmenter le courant de polarisation du
MAX435 tout en diminuant son gain afin d'arriver à un compromis
acceptable.
Nous avons validé cette configuration avec différentes
longueurs de câble : voir le résultat
des essais
Selon le câble
utilisé ( résistance série importante ) , si le
réglage de R11 est 'un peu juste' on peu sans problèmes
le passer à 470 Ohms au lieu de 200.
L'emetteur
Le recepteur

Les deux seuls réglages se situent coté récepteur
et sont à retoucher en fonction du type et de la longueur de
câble utilisée.
R11 règle essentiellement la luminosité du signal (
réglage du gain pour compenser les pertes dans le câble )
et C16 permet d'améliorer la couleur ( compensation de la perte
des hautes fréquences du signal de chrominance ).
D'aprés la note
d'application de MAXIM , ce circuit peut
être utilisé jusqu'à environ 1500m ! , qu'en est il
vraiment ?
Nous avons testé ce circuit sur du
câble ethernet standard UTP ( non blindé ) , avec une
bobine de 275 M sur laquelle nous avons mis les paires en
série afin d'obtenir des longueurs supérieures ( 275 M
pour un aller simple sur 1 paire , 550M pour 1 paire aller + 1 paire
retour et ainsi de suite ... ) résultats :
Pour 275M de câble : la vidéo est
OK
Pour 550M : la vidéo est toujours OK ( on peut affiner les
réglages avec R11 et C16 )
Pour 825M : on pert la couleur !!! , mais pas de panique , on augmente
la valeur de C16 ( au environs d' 1 nF ) et tout rentre dans l'ordre (
ouf ! )
Pour 1100M : on re-perd la couleur !! , mais là , pas moyen de
la récupérer en jouant sur C16.
( Il faudrait prévoir un réseau plus efficace qu'un
simple R-C pour compenser la perte des hautes fréquences
dans le câble )
Nous avons également testé la liaison sur 275 M
avec
deux autres paires du
câble alimentant en 220V une charge de 500W ! , la vidéo
toujours impéccable !
En conclusion le système donne d'excellents résultats
mais commence à avouer ses limites vers les 900 M, c'est plus
que suffisant pour la plupart des ROV !
( dans le cas contraire il suffit d'insérer un
répéteur dans la ligne et on doit pouvoir aller beaucoup
plus loin ... )
Sur DIXI2 ( en cours de conception à cette date ) , des portes
analogiques (4066) ont étés ajoutées en
entrée de l'émetteur afin de pouvoir choisir entre
plusieurs caméras ( avant , arrière , faible
luminosité , ... ).
 Ci dessus une vue des prototypes des cartes : vidéo , gestion
éclairage et commande zoom/focus de DIXI2
Ci dessus une vue des prototypes des cartes : vidéo , gestion
éclairage et commande zoom/focus de DIXI2






